EN
EN  PL
PL  DE
DE  FR
FR  IT
IT  ES
ES  CS
CS  SV-SE
SV-SE  DA
DA  NL
NL  HU
HU  RO
RO  UA
UA 

MFV MEASUREMENT VEHICLE
The MFV is built around three measurement subsystems: HDI, ROW and RSP-III, managed by a common control unit. The vehicle makes it possible to simultaneously collect data on the road's longitudinal profile, photos of the pavement surface and the environment of the road under study.

MFV – front view

MFV – rear view

MFV – operator station
The High Definition Imaging (HDI) system is used to capture images of pavement surfaces to identify damage. The device is capable of collecting data in the form of pavement images with a resolution of 1x1 mm over a width of almost 4 m and at measurement speeds of up to 100 km/h. The unique design solution makes the cracks in the structure visible in any lighting conditions both laterally and longitudinally. The principle of the system operation is based on the use of two pairs of devices: a linear illuminating laser (Figure – red colour) and a slit camera (Figure – blue colour). While performing the measurement, the device scans the pavement every 1mm, and the final result is a pair of left and right images of a predefined length, such as 2 m.

HDI – general view of the device
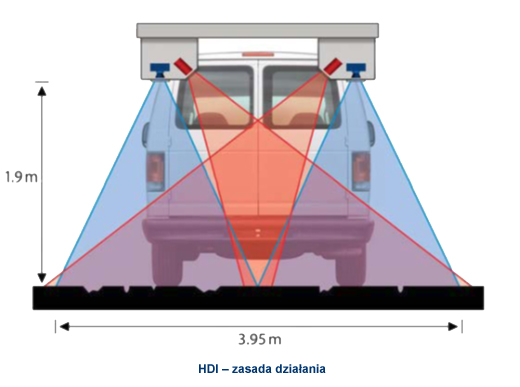 HDI – operation principle
HDI – operation principle
The Right of Way (ROW) system complements the HDI system and is used to capture images of the road pavement and right-of-way. The main components of the system are three cameras placed at the windshield of the vehicle and one camera, located at the rear of the vehicle, from which the image is transmitted directly to the central control unit and there associated with the corresponding measurement files. Thanks to the recorded images, it is possible to easily locate pavement damage and link it to existing road infrastructure, for example.
The RSP (Road Surface Profiler) system consists of a measuring beam, a control unit and a PC common to all measurement systems. A laser sensor and an accelerometer are mounted in the beam. The principle of the longitudinal profile test is to measure the distance between the car and the pavement using a laser sensor with simultaneous correction of the vehicle's deflection recorded by an accelerometer. The longitudinal profile of the pavement obtained from the measurements is an elementary pavement feature that is used to determine such condition parameters as the International Roughness Index (IRI).
SP Rmeasuring beam